
案例分享第2期|ALSONTECH 机器人3D视觉定位方案(汽车零配件篇)
前言
在汽车经济首次下滑的大环境下,汽车零部件企业亟待通过高附加值、高品质的产品以有效抵御风险。传统生产单个品种的产线快速被淘汰,随之而来的自动化、智能化产线改造需求进入快车道。
由埃尔森提供的机器人3D视觉系统AT-S1000系列,搭配工业机器人,组成柔性化升级改造解决方案,针对多品种、中小批量的零部件加工,改变了原来单个机床手动加工的模式,使自动化柔性生产成为可能。
项目背景
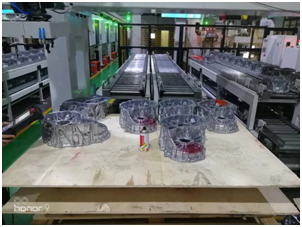
某知名汽车配件厂专门设计和生产多种规格的变速箱壳体。在最新打造的智能工厂中,要求实现产线无人化生产,以确保高流程可靠性,高精度加工时效率和最大灵活性。
埃尔森作为3D视觉领域的专家,为汽车零配件企业提供了很多零配件产线的机器人视觉解决方案。而本文中某知名企业所需解决的是一个新问题:以简单的方式让AGV和6轴机器人实现工件转运、自动上料。

面临问题和急需解决的痛点
AGV停靠精度不高,误差为±20mm。如果在上面设计定位工装,将导致其上料和下料时,6轴机器人无法准确放置和抓取。只能选择使用托盘放置工件。
我们的解决方案
埃尔森智能科技工程师打造了一款智能且可靠的机器人上下料系统。系统的核心是AT-S1000-04A机器人3D视觉系统,系统准确获取工件位置(X、Y和Z坐标和角度),引导机器人精确抓取托盘上任意位置的工件。为了保持过程稳定,考虑现场布局的影响,将传感器装在机械臂末端,从而避免相机安装支架与机器人、AGV产生干涉。产品配置:视野范围设定600×500×200,定位精度±1mm,定位节拍6s,线长29.3米。

方案优势
1. 采用快速建模功能,实现在15分钟内可以导入一个新的型号,无需重新设计工装夹具和机器人示教。
2. 柔性化程度高,AGV无需精准到位,工件摆放位置较随机,托盘形变无影响。
3. 采用线激光主动扫描,对光照和工件反光有很好的适应性。
4. 配备专业的加长线缆,保证高质量图像数据在25米远距离稳定传输。
5.客户期许
柔性化的视觉定位,在任何情况下都能准确定位目标工件。
6.客户收益
1. 解决了困扰已久的定位问题,项目实施顺利推进,节约了大量施工成本。
2. 3D视觉的柔性化使得整个技术方案的复杂度、困难度大大降低。
3. 视觉系统支持远程协助,后续维护方便。
4. 后续新工件的生产导入非常方便,降低导入成本。
;)
;)
;)

;){kind=link}