
案例分享第4期|ALSONTECH 机器人3D视觉定位方案-机床上下料篇 前言
前言
在机械制造业中,企业对产品的质量控制不可忽视。其中,铸件的质量对机械产品的性能有很大影响。例如,泵壳的液压件内腔的尺寸、型线的准确性、表面粗糙度等问题,会直接影响泵和液压系统的工作效率。国内人口红利逐渐消失,加剧了铸造业招工的问题,这也将推动铸造业企业自动化升级改造,以应对加工要求的灵活性和复杂性。
由埃尔森提供的机器人3D视觉定位系统AT-S1000系列,搭配工业机器人,组成柔性化升级改造解决方案,针对复杂铸件实现定位抓取、机床上下料,解决了铸造业企业面临的上下料难,人工成本高,精度差的问题。

(图片来源于网络,侵删)
项目背景
某著名的铸造企业高精度精加工产线,在泵壳铸件抓取机床上下料工序,面临基础工位上的招工问题越来越严重,企业高薪聘用工人,在承担了高成本的费用之后,后期还会面临留人难的问题。替代人工的其一解决方案是改用自动化输送系统。但这种设备占地面积大,无法适应狭小的安装环境。另外一种方案是使用机器人上料,但6轴机器人的使用限制是一台机器人无法兼顾4台数控机床,8个工件托盘的上料作业。
项目痛点
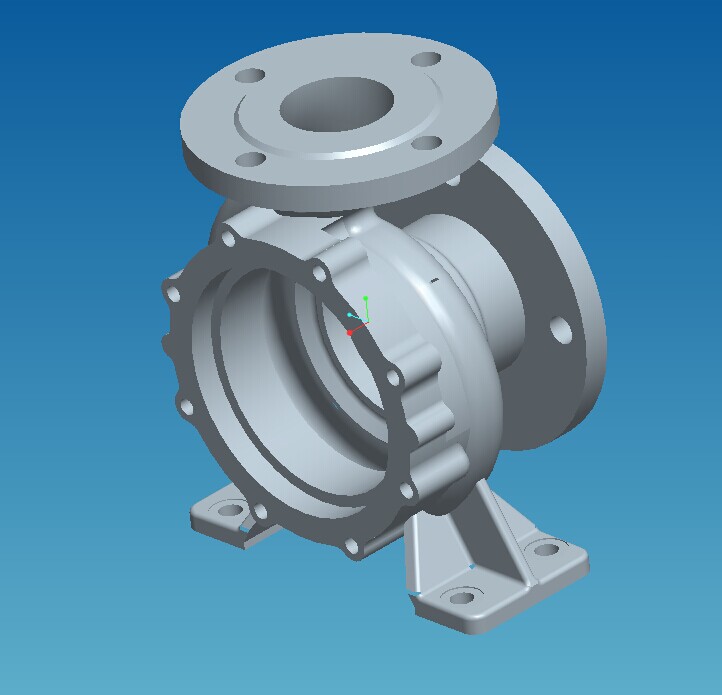
1. 泵壳铸件外形复杂,表面有一定的反光。
2. 泵壳加工精度要求高,抓取时不能损坏铸件。
3. 泵壳铸件一致性差,每次来料放在托盘里,不能保证是完全顺序摆放。
(图片来源于网络,侵删)
我们的解决方案
为使视觉系统能够适配个性化应用案例确保实现多种类型工件无障识别,协助机器人集成商完成双动方案。将机器人安装在导轨上,可实现来回移动。可以保障4台加工中心的上料作业。将埃尔森3D视觉传感器安装在机器人手臂末端,采用高精度激光三维测量算法,快速获取工件的三维数据,轻松实现8个托盘上4种工件的快速识别,引导机器人准确抓取。

(工件图/图片来源于网络,侵删)
方案优势
1. 采用主动式激光扫描,抗干扰性更好,能适应复杂的自然光环境。
2. 精度提高,相对于人工操作,视觉定位抓取稳定性更好,精度更高。
3. 优化机器人路径规划,解决机器人碰撞隔栏,碰撞托盘等问题,实现安全防碰撞抓取。
4. 采用快速建模功能,实现在15分钟内可以导入一个新的型号,使产品实现快速无缝切换,保障工厂的生产效率提高。
客户期许
客户期望3D视觉能取代人工,实现智能全自动上料,解决他们工厂所面临的难题。
客户收益
1. 解决了机床上下料的难题,实现了无人全自动化。
2. 节省了各种人力成本,包括人员薪资,人员培训,人员招聘等各种费用。
3. 降低了废品率,相对人工,视觉定位精度更高。
4. 产品简单易用,现场的普通工人即可以完成操作或维护。
;)
;)
;)

;){kind=link}